




【华e生活编译】据北卡州立大学官网报道,研究人员已经开发出一种新的软体机器人设计,它可以同时进行三种行为:向前滚动,像唱片一样旋转,以及沿着围绕一个中心点的轨道运行。
该设备无需人工或计算机控制即可运行,有望开发用于导航和绘制未知环境地图的软机器人技术。
这种新型软体机器人被称为扭曲环形机器人。它们是由缎带状的液晶弹性体制成的,这些弹性体像意大利面一样扭曲,然后在末端连接在一起,形成一个类似手镯的环。当机器人被放置在至少55摄氏度(131华氏度)的表面上时,接触表面的部分会收缩,而暴露在空气中的部分则不会,这引起了滚动运动。表面温度越高,机器人滚得越快。
“丝带在其水平轴上滚动,给环带来向前的动量。”该研究的通讯作者、北卡州立大学机械与航空航天工程副教授尹杰(Jie Yin)说。
这种扭曲的环状机器人还可以沿其中心轴旋转,就像唱片在唱片机上旋转一样。当扭曲的环状机器人向前移动时,它以环绕中心点的轨迹前进,实际上是在一个大圆圈中移动。然而,如果扭曲的环状机器人遇到边界 ,如箱子的立面,它将沿着边界移动。
“这种行为对绘制未知环境可能特别有用。”尹说。


这些扭曲的环状机器人是受物理智能支配行为的设备的例子,这意味着它们的行动是由它们的结构设计和制造材料决定的,而不是由计算机或人类干预。
研究人员能够通过设计该装置的几何形状来微调扭曲的环状机器人的行为。例如,他们可以通过将丝带扭曲成一侧或另一侧来控制扭曲的环状机器人旋转的方向。速度可以通过改变丝带的宽度、丝带中的扭曲数等进行调节。
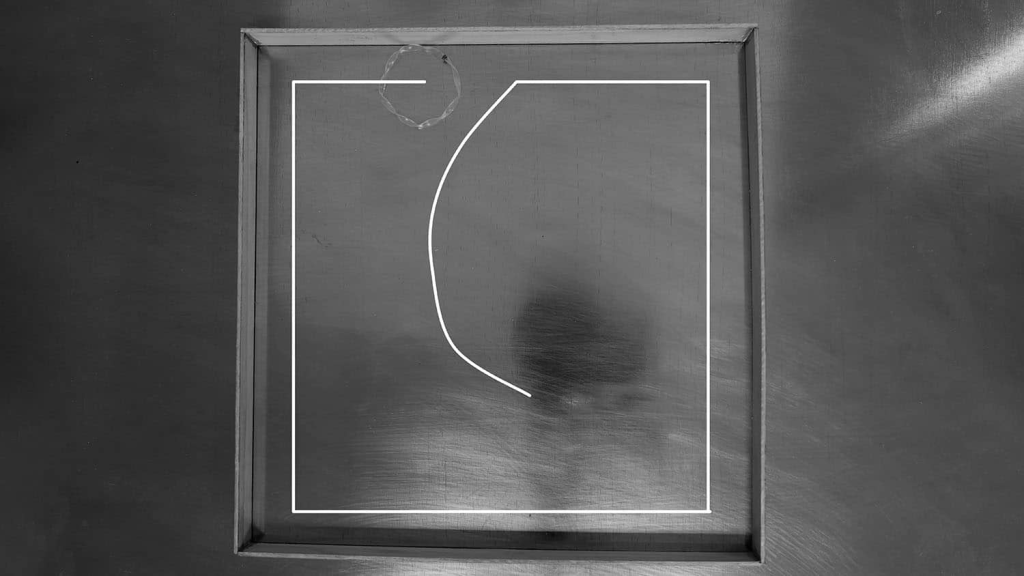
在概念验证测试中,研究人员展示了扭曲的环状机器人能够沿着各种受限空间的轮廓移动。下面的视频展示的就是扭曲的环状机器人:
“无论扭曲的环状机器人被引入到这些空间的何处,它都能够沿着边界走到,并沿着边界线绘制空间的轮廓 – 无论是正方形、三角形等等。”该论文的第一作者、北卡罗来纳州立大学的博士生Fangjie Qi说,“它还能够识别边界上的缝隙或损坏。
“通过引入两个扭曲的环状机器人,我们还能够绘制更复杂空间的边界,每个机器人以不同的方向旋转,”Qi说。“这导致它们沿着边界走上不同的路径。通过比较两个扭曲的环状机器人的路径,我们能够捕捉到更复杂空间的轮廓。”
“原则上,无论空间有多复杂,如果您引入足够多的扭曲的环状机器人来绘制整个图像,您将能够绘制它,每个机器人都会提供其中的一部分。”尹说,“而且,鉴于这些相对便宜,这是可行的。
“软机器人学仍然是一个相对新的领域。”尹说,“以可重复、工程化的方式控制软机器人运动的新方法将该领域推向前进。推进我们对可能性的理解是令人兴奋的。”
该论文标题为“自主周期翻转旋转轨道软机器人的缺陷扭曲环拓扑”,于2024年1月9日发表在《美国国家科学院院刊》上。论文的合著者包括北卡州立大学的博士后研究员Yanbin Li和Yao Zhao,北卡州立大学博士生Yaoye Hong,以及北卡州立大学的博士生Haitao Qing。






